機器人關節是機器人身體不同部位之間的可移動連接,與人類的關節非常相似。這些連桿使機器人能夠彎曲、扭轉和向各個方向移動,從而使它們能夠執行任務并與環境互動。機器人關節有多種形式,包括手臂和腿部的旋轉關節,以及機器人夾持器和其他工具。這些關節通常配備有執行器、傳感器和機械部件,以促進受控運動和精確定位。總的來說,機器人關節對于移動性和機器人的功能應用范圍十分廣泛,從制造、裝配到勘探和醫療保健。
機器人關節的解剖和功能
機器人關節是一種像人類一樣扭轉和運動的關節。
機械和電氣部件共同協作,使機器人關節能夠靈活、精確、高效地執行各種任務。
這些部件的組合使機器人能夠模仿人類肢體的復雜運動,并在以下行業中有效地執行各種應用:制造業、醫療保健和探索。
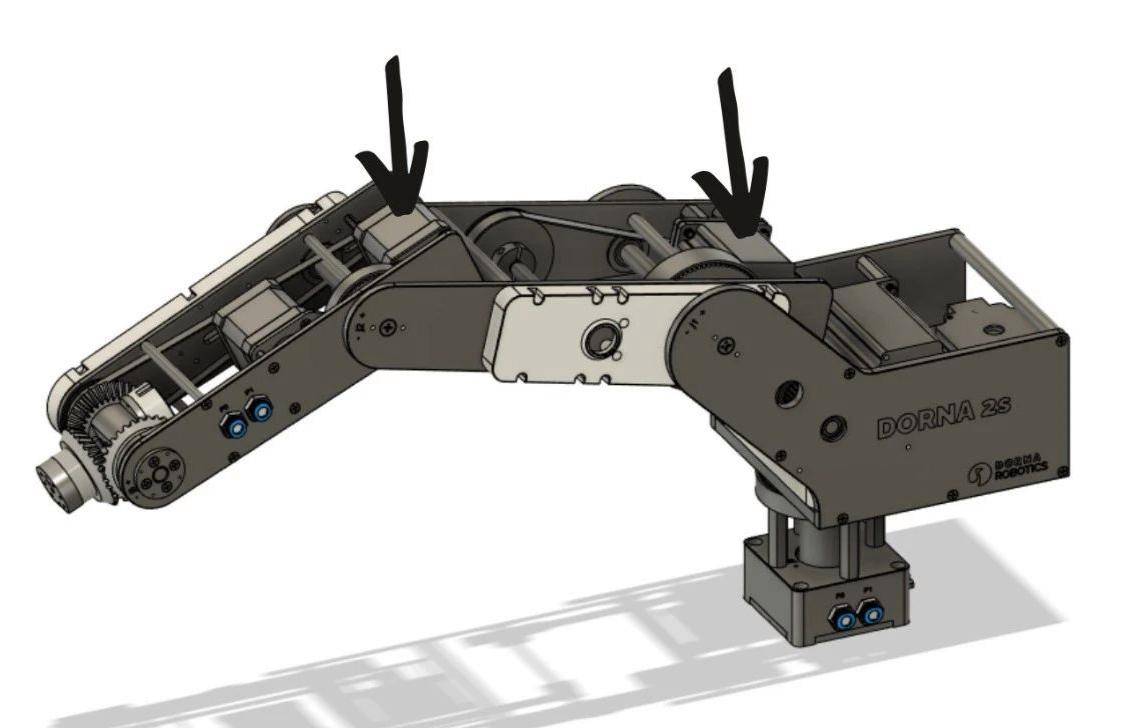
(一)機械部件——軸承
軸承在減少摩擦和實現關節內平穩運動方面起著至關重要的作用。它們支持關節內零件的旋轉或線性運動。機器人關節中使用的常見軸承類型包括滾珠軸承、滾柱軸承和滑動軸承。這些軸承通常由鋼或陶瓷等耐用材料制成,旨在承受高負載和速度,同時最大限度地減少摩擦損失。
(一)機械部件——連桿
連桿是桿、桿和關節的機械組件,用于在機器人關節的不同部分之間傳遞運動和力。它們可以很簡單,例如單個鉸鏈關節,也可以更復雜,例如多桿連桿機構。連桿允許受控運動并放大或減小施加到關節上的力。通過精心設計連桿的幾何形狀和布置,工程師可以根據機器人任務的要求實現特定的運動曲線和機械優勢。
(一)機械部件——齒輪
齒輪是帶齒的機械部件,可在關節內的旋轉軸之間傳輸運動和動力。它們可以根據其配置改變速度、扭矩或旋轉方向。機器人關節中常用的齒輪類型包括正齒輪、斜齒輪、錐齒輪和行星齒輪。齒輪對于將執行器的旋轉運動轉換為關節所需的運動至關重要。它們還提供機械優勢和對關節運動的控制,從而實現精確的定位和操縱。
(二)電器元件——電機
電機是機器人關節的動力源,可將電能轉化為機械運動。電機有多種類型,包括直流電機、步進電機和伺服電機。
直流電機提供連續旋轉,常用于需要速度控制的應用中。步進電機提供對位置的精確控制,常用于需要精確定位的機器人系統中。伺服電機結合了直流電機和步進電機的特點,可精確控制速度和位置。機器人臂關節電機的選擇取決于機器人關節特定應用所需的扭矩、速度和運動精度等因素。
(二)電器元件——傳感器
傳感器在向機器人控制系統提供反饋方面起著至關重要的作用,使其能夠準確監控和調整關節的位置、速度和力量。編碼器通常用于測量關節的旋轉位置,為控制運動提供精確的反饋。
電位器測量旋轉角度,而稱重傳感器測量關節施加的力。此外,接近傳感器檢測關節附近是否存在物體,從而提高安全性并防止碰撞。通過集成各種類型的傳感器,機器人關節可以精確操作并動態響應環境變化,確保高效、安全的運行。
(二)電器元件——控制系統
這控制系統充當機器人關節的中樞神經系統,協調傳感器、執行器和其他組件之間的交互。它處理來自傳感器的反饋以確定關節的當前狀態并計算實現所需運動所需的命令。
比例-積分-微分 (PID) 控制器是常用的算法,可精確調節關節的位置、速度和力。模糊邏輯和神經網絡等先進控制技術可以增強控制系統的適應性和魯棒性,使機器人關節能夠在各種環境中執行復雜任務。通過精確的協調和反饋機制,控制系統可確保機器人關節平穩、高效、安全地運行,滿足機器人的需求各種應用。

 掃一掃咨詢微信客服
掃一掃咨詢微信客服